Configuration
The CNS Flight Stack configuration is grouped into seven categories:
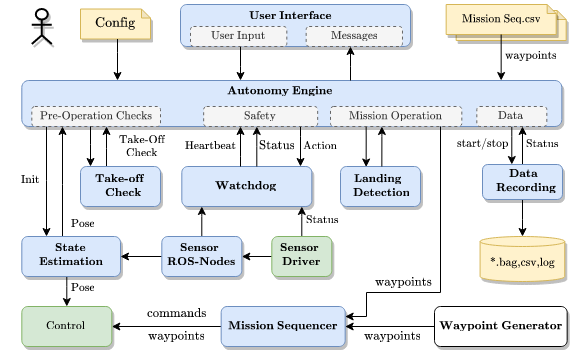
As the CNS Flight Stack is currently ROS-based, for each category, several parameters can be set and updated. A detailed list can be found the full list of all parameters
This part assumes that you have successfully completed the Installation guide and compiled the [CNS Flight Stack Workspace] correctly.
We provide an install script to create your personal flight stack configuration for your project or vehicle. This script will create an additional workspace (called <CONFIG_NAME>_cws and initialize it as a git repository for your convenience. It will then include a ROS package called <CONFIG_NAME>_bringup with the launch scripts for your personal configuration.
cd <PATH_TO_FLIGHSTACK_CWS>/flight_stack_cws
./scripts/create_bringup.sh -d <PATH_TO_NEW_WORKSPACE> -n <CONFIG_NAME>
# please consult ./scripts/create_config.sh -h for furter information
# source the workspace accordingly
source <PATH_TO_NEW_WORKSPACE>/<CONFIG_NAME>_cws/devel/setup.bash
roscd <CONFIG_NAME>_bringup/launch/You can then set up the configuration in the global variable and six individual launch files:
-
<CONFIG_NAME>_vars.envsee Configuration:Global -
<CONFIG_NAME>_sensors.launchsee Configuration:Sensors -
<CONFIG_NAME>_estimation.launchsee Configuration:Estimation -
<CONFIG_NAME>_navigation.launchsee Configuration:Navigation -
<CONFIG_NAME>_safety.launchsee Configuration:Safety -
<CONFIG_NAME>_recording.launchsee Configuration:DataStorage -
<CONFIG_NAME>_operator.launchsee Configuration:Operator
Our provided launch scripts already allow the usage of any personal configuration by providing the corresponding configuration name on startup:
# make sure your configuration workspace is sourced
# for remote execute
fs_remote core@<UAV_IP> -d <CONFIG_NAME> -s <CONFIG_NAME> -f <CONFIG_NAME>
# for onboard execute either one of these
fs_dev<1|2> -d <CONFIG_NAME> -s <CONFIG_NAME> -f <CONFIG_NAME>
fs_operator -d <CONFIG_NAME> -s <CONFIG_NAME> -f <CONFIG_NAME> # would also be launched by fs_dev1 automaticallyFurther information on the usage can be found in the Usage guide.