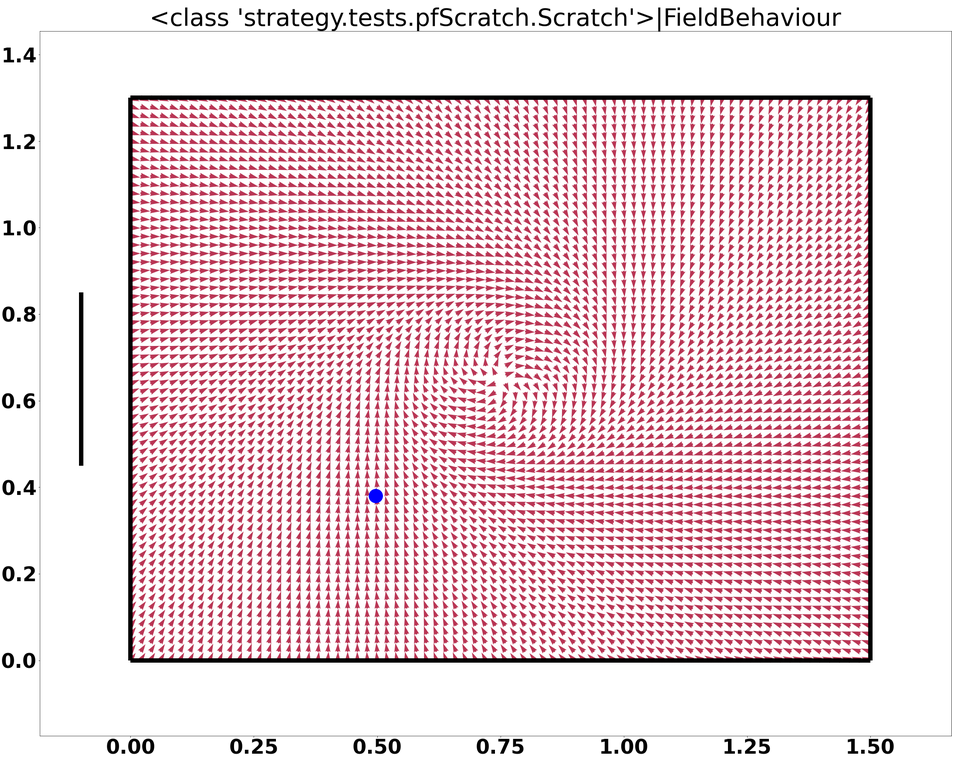
Potential Field Tangential Field
| Parâmetro | Função |
|---|---|
| target | Centro do campo potencial (x, y), pode ser uma função dinâmica, em metros. |
| decay | Função matemática que determinará o decaimento da velocidade máxima até zero, deve ter domínio e imagem entre [0, 1]. |
| radius | Raio no qual os robos irão orbitar, em metros. |
| radius_max | Raio máximo onde o campo irá operar, deve ser maior ou igual o radius. |
| multiplier | Velocidade máxima desse comportamento, em m/s. |
| field_limits | Aplica as dimensões do campo, caso você deseje que a função não funcione fora do campo (por exemplo, dentro dos gols). |
| clockwise | Define se o comportamento terá sentido horário ou anti-horário, true para horário. |
| K | Constante de amortecimento da função tangencial, se deixar como nulo, será atribuído o valor padrão de 1/25000. |
self.field.add_field(
TangentialField(
self.match,
target=(0.75, 0.65),
radius = 0.20, # 20 cm
radius_max = 1, # 100 cm / 1 m
clockwise = False,
decay=lambda x: 1, # sem decaimento
field_limits = [0.75* 2 , 0.65*2],
multiplier = 0.5 # 50 cm/s
)
)