RC ~ RC with iNav
- only atheros chipsets support RC via EZ-WBC. (Supported WiFi Adapters)
- review your iNav board here before buying and connecting (iNav boards)
- only uninverted rc serial connections can be made
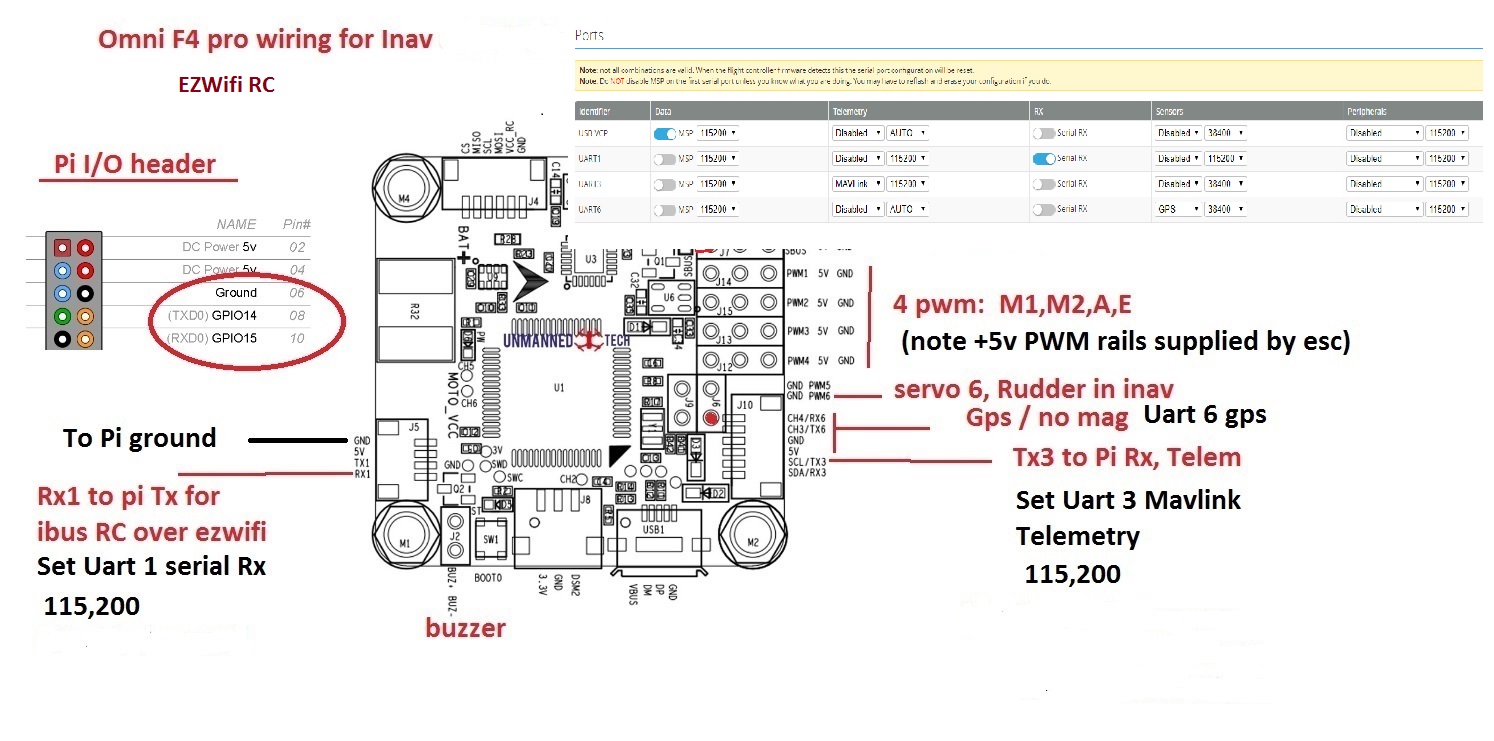
- recommended and tested baud rate for RC is 115200
- review the RC General Page in the wiki
-
Edit the wifibroadcast-1.txt in the boot partition (both AirPi & GroundPi) and set:
RC=sumdOrRC=ibusCTS_PROTECTION=YFC_RC_BAUDRATE=115200 -
To enable RC RSSI on the OSD edit the osdconfig.txt on GroundPi and uncomment:
#define RC_RSSIline. (Remove the “//” in front of the line)
-
Connect your flight controller to the configurator and open the Ports tab
-
Turn on “Serial RX” on the Uart you have connected the wire from the AirPi tx pin. Now save settings
-
Open the Configuration tab. Under Receiver Mode select “RX_SERIAL” and the protocol you choose earlier in EZ-WBC settings. Now save settings
-
Connect the AirPi tx pin to your flight controller uart rx pin. This is the same uart you have selected in the configurator. This uart might also be shared and/or labeled as the designated serial rx pin (serial rx, sbus, ppm) it depends on your board. Keep in mind some boards have soft serial capability thereby allowing an uninverted serial connection to be made. NOTE: softserial connections are limited to 19200 baud. This limits you to the msp protocol in EZ-WBC, which is msp v1. Users have had success with msp rc but beware.
-
Test. Power everything while the FC is connected to the iNav configurator and view the receiver tab
NOTE: Because most users will want telemetry as well as RC via EZ-WBC: Serial RX and telemetry are not allowed to share the same uart in the iNAV configurator. Connect the AirPi rx pin (telemetry) to a different uart than the one you have assigned rc control (serial RX)