Motor IOCs
Wiki > The Backend System > Specific Device IOC > Motor IOCs
The basis of the motor IOCs at ISIS is the motor record, which aims to provide a generic interface to all motors regardless of make or model. The motor record is a single PV that contains a number of fields for things like motor speed, position, encoder readback etc. Note that this is very different from the way other IOCs would normally be set up, where each of these values would be its own PV.
Naming conventions for motor PVs are also different in that all motors are of the form %PVPREFIX%MOT:MTR0101 where the first number gives the controller and the second gives the axis. These controller/axis numbers are what dictates the axis position in the table of motors.
For most motor IOCs the motor record itself is pulled in from support\motor\master\motorApp\Db\motor.db. However, the Galil contains its own copy of the motor record in support\galil\master\GalilSup\Db.
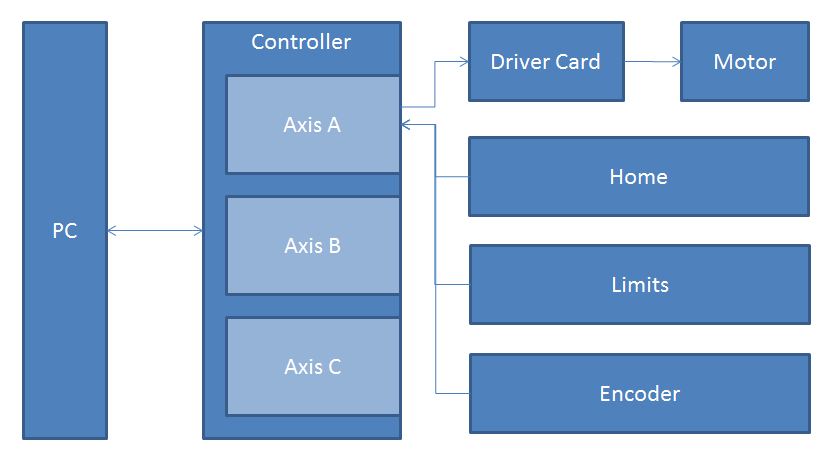
In general one motor controller will control a number of different axes (the actual motors themselves). Each axis will most likely give some feedback to the controller, the most common types of feedback are:
- Encoder: This is some form of external device that is measuring where the axis actually is. This is normally fed back to the controller in steps, the motor record will convert this to a distance using a supplied resolution.
- Limits: A binary signal that tells the controller that the motor has reached the edge of it's travel. There will be a high and a low limit for each direction of travel.
- Home: A binary signal that tells the controller when the axis is at a known home position.
All motor IOCs have a macro called MTRCTRL which defines the controller number. The controller number is used to create the PVs for each axis and gives the row where each axis will appear on the table of motors.
Motors will tend to have a subset of the following *.cmd files for loading dbs:
| Filename | Description | Location |
|---|---|---|
| st.cmd | Should be very simple, only loading the st-common.cmd | One in each iocBoot folder for each IOC |
| st-common.cmd | The main cmd for the IOC | A single version in the first IOC |
| st-ctrl.cmd | Creates IF macros for which controller we're loading | A single version in the first IOC |
| st-max-axis.cmd | Calculates the maximum axis we need to load | A single file in the first IOC |
| st-axis.cmd | Loads each individual axis | A single file in the first IOC |
| st-motor.cmd | Loads the actual db files for each individual axis | A single file in the first IOC |
| galilXX.cmd | Sets up the physical connection for a Galil | A file for each galil in configurations\galil
|
The motors currently used at ISIS are:
- Galil - This is the most widely used motor type.
- SMC
- Linmot
- McLennan
- Beckhoff
- SM300
- Attocube
- Newport
- General Jaws
- Barndoors and Momentum Slits on MUON Front End
- Axis - a user-defined axis which puts a layer of indirection between the user and the low-level motor
- Motion Setpoints
- Set the raw position of the motor without moving it
- IMAT Lens Adjustment
- Motion Setpoints
- Creating soft motors to control real motors This is useful if you need some logic for transformations between axes.
- Adding a motor IOC to global motor moving and stop all
- Clearing the Motors are Moving state
- Portable Eulerian Cradle see on ENGINX
- SANS2D Front Beam Stop inhibit movement
- EnginX Sample Positioner
- Disabling motor from view in the motor table